and radar distance from target vehicle lane.
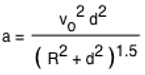
| a = acceleration vo = speed |
d = radar distance from target vehicle lane center R = range |
| Cosine Effect Acceleration |
The cosine effect induces a deceleration component (-a) for approaching vehicles, and an acceleration component (+a) for receding vehicles. The closer the vehicle the faster the angle and measured speed change and the greater the acceleration component.
The cosine effect acceleration component is a function of vehicle speed and range from radar, and radar distance from vehicle lane. Applying a little calculus and trigonometry to velocity vectors and the geometry the vehicle cosine effect acceleration can be calculated.
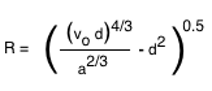
| a = acceleration vo = speed |
d = radar distance from target vehicle lane center R = range |
The cosine effect equation for acceleration can be used to determine the range for a given acceleration and radar distance from vehicle lane and vehicle speed.
| a = cosine effect acceleration vo = speed |
d = radar distance from target vehicle lane center R = range from radar |
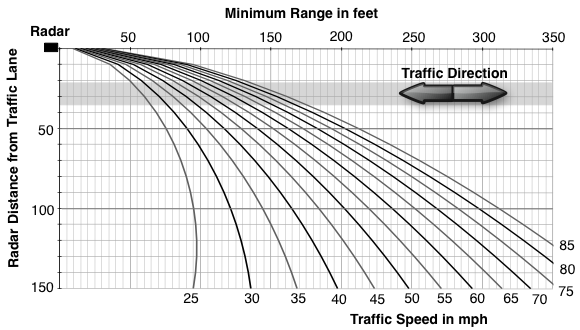
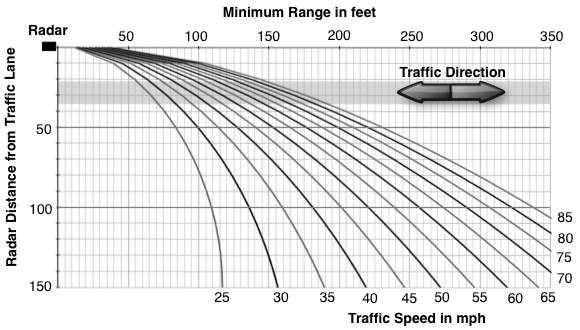
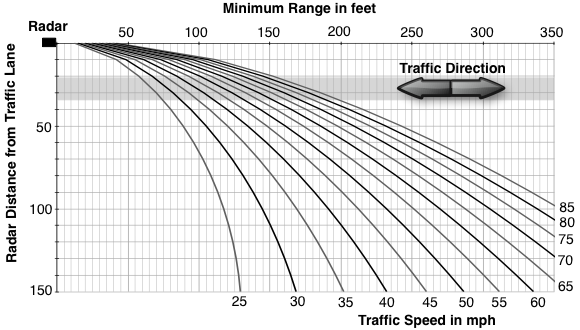
The above equations can be used to determine radar minimum range, vehicles closer than minimum range cannot be measured.
| Minimum Range |
A radar cannot measure speed when acceleration exceeds the radar limits due to the cosine effect, or anything else - curves, vehicle slowing or accelerating. Radar acceleration limit is a function of radar accuracy and sample time - minimum time required to get one speed measurement. Speed cannot change faster than radar or lidar accuracy during one sample period.
| amax = ±vacc / ti |
|
amax = radar acceleration limit vacc = radar accuracy ti = radar sample time or integration period |
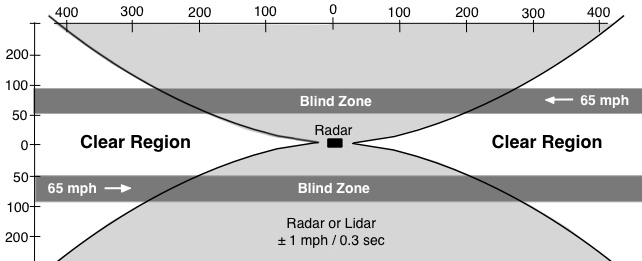
The acceleration limit sets a minimum range, vehicles inside minimum range are too close to measure because the relative speed is changing too fast. Minimum range applies to vehicles traveling toward and away from the radar.
|
Accuracy is typically ±1 mph, sample times vary with model from 1/4 to 1/2 second. Many microwave radars have a sample time of 0.3 seconds (300 milliseconds), laser radars typically have longer sample periods.
Target vehicle acceleration must be within limits for an entire sample time. Radar / lidar minimum range is the range acceleration exceeds limits plus one sample period.
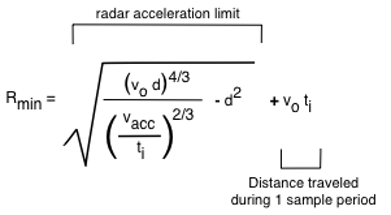
| Rmin = Minimum Range vo = Speed |
vacc = Radar Accuracy d = Radar Distance from Target Vehicle Lane Center ti = Radar Sample Time |
| |||||||||||||||