Laser radars, also referred to as lidars, use pulsed infrared laser light invisible to the eye instead of continuous microwaves
| Acronyms | ||
| LASER | - | Light Amplification by Stimulated Emissions of Radiation |
| LADAR | - | LAser Detection And Ranging |
| LIDAR | - | LIght Detection And Ranging |
| RADAR | - | RAdio Detection And Ranging |
Laser radars transmit pulsed infrared laser light to measure target range. The time it takes a pulse to travel at the speed of light from the lidar to the target and back is used to compute range. The change in range over time is used to calculate speed. Laser radars typically require 0.3 to 0.7 seconds sample time to get one speed reading. Tens to hundreds of pulses are used to calculate one speed reading.
Laser radars operate from a stationary position only, no moving mode, and measure speed of approaching or receding traffic. Most models also have a range only mode for measuring the range of stationary objects.
The Federal Communications Commission (FCC) regulates radiated emissions from high speed circuits such as the processing circuits inside a lidar, but not light frequencies or wavelengths. The Federal Drug Administration (FDA) Center for Devices and Radiological Health (CDRH) regulates laser products sold in the United States. Police laser radars are Class 1 devices, by American National Standards Institute (ANSI) definition, and considered eye-safe based on current medical knowledge. Even so do not stare or look at a laser aperture while transmitting, especially on beam.
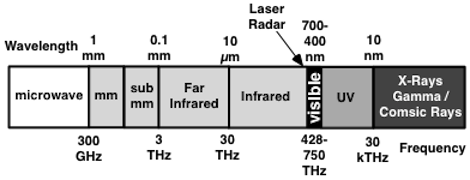
| Infrared Spectrum |
Laser radars radiate in the infrared (IR) part of the spectrum at 904 nanometers wavelength. Visible light is between 700 nanometers (red) and 400 nanometers (violet).
Light is measured in wavelength instead of frequency. Common wavelength dimensions include angstroms, nanometers, and microns.
| unit | Symbol | meters | inches |
| angstrom | ang | 10-10 | 0.000 000 004 |
| nanometer | nm | 10-9 | 0.000 000 039 |
| micrometer or micron | µm | 10-6 | 0.000 000 370 |
| Range and Speed Measurements |
Laser radars are really laser range finders adapted to calculate speed by measuring range difference over a period of time. These instruments are pulse modulated and transmit narrow infrared laser light pulses at a fixed rate. Range is determined by measuring the time it takes a single pulse to travel from the lidar to the target vehicle and back. At least two pulses are required to calculate speed. In practice 10's to 100's of pulses are processed to determine one speed measurement.
Pulse round trip time is measured to determine range. Target vehicle range is half the round trip distance the pulse travels, and half the time.
|
R = Range from Lidar to Target Vehicle t = Pulse Round Trip Travel Time c = Speed of Light |
Data Set Collection
The lidar collects a series of range measurements during a sample time period before calculating speed. To distinguish legitimate echoes from false returns each echo pulse must be within expected pulse widths limits to be used as a valid data point. An entire data set must meet variance and standard deviation constraints to be considered valid. A valid data set is usually processed with a linear least squares line algorithm to line fit the change in range for computing speed.
Early lidars discarded an entire data set if only one echo was missing or out of place. Modern lidars process speed if a limited number of echoes are missing or out of expected bounds. Manufacturers do not disclose, claim proprietary, any details on the criteria used to determine valid data sets making independent scrutiny impossible.
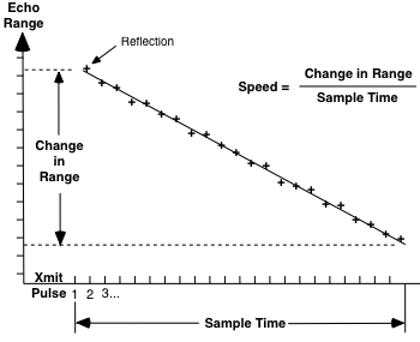
Speed Calculation
After a data set is determined valid the lidar calculates velocity from change in range divided by sample time. Decreasing ranges indicate the vehicle is moving toward the lidar, increasing ranges the vehicle is moving away. Under ideal conditions the lidar could display a speed reading after only one sample period. In practice a second or more is more realistic. Bad conditions, fog, rain, carbon dioxide, obstructions, could force the lidar to take as long as several seconds or miss a target entirely.
| Laser Systems |
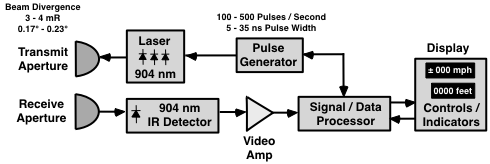
Laser systems use diodes to generate a laser pulse for transmission to an optical aperture. A diode detector sensitive to IR converts the reflections to electrical signals. A computer processes the reflection's amplitude, pulse width, and time of arrival to determine if the reflection is legitimate.
Laser radar apertures, light antennas, are optical focusing devices, lenses, prisms, and mirrors, used to collimate laser energy into a narrow beam. Some models use the same aperture for transmit and receive, some use separate apertures. Some multiple apertures are side-by-side, others are one on top of the other where the top aperture radiates.
Laser radars typically use 3 semiconductor diodes to generate infrared laser light. Return signals, reflections, are routed directly from the aperture to an infrared detector. The detector converts infrared light to electrical energy and routes the signals to a video amplifier. The video amplifier adjusts signal gain by time, longer range signals require more gain. Video signals that exceed the detection threshold get processed for leading edge detection by range gates for tracking. If the data set passes the preprogrammed test criteria target data can then be calculated and displayed.
A programmable processor allows the flexibility to program different pulse widths, PRF's (Pulse Repetition Frequency) and algorithms for computing speed. Exact parameters vary with manufacturer, model, and even software version. Pulse transmit rates are between about 100 to 500 pulses per second. Sample times will be on the order of 0.3 to 0.7 seconds. Pulse widths have been reported to be as low as 5 ns and as high as 35 ns.

Minimum range is a function of pulse width. To receive an entire pulse, as opposed to a fraction, target range must be at least half the pulse width in range for a total of 1.5 pulse widths from time zero. Pulse width minimum range varies from about 4 to 26 feet.
| Band: | Infrared |
| Wavelength: | 904 nm ± 5 nm |
| Beam Divergence: | 3 - 4 milliradians (0.17° - 0.23°) |
| Sample Time: | 0.3 - 0.7 seconds |
| Maximum Range: | 2000 - 3000 feet |
| PRF: | 100 - 500 pulses / second |
| Pulse Width: | 5 - 35 nanoseconds |